Vector equations of planes in R3
This applet shows a plane in ℝ3 and the vector form of its equation.
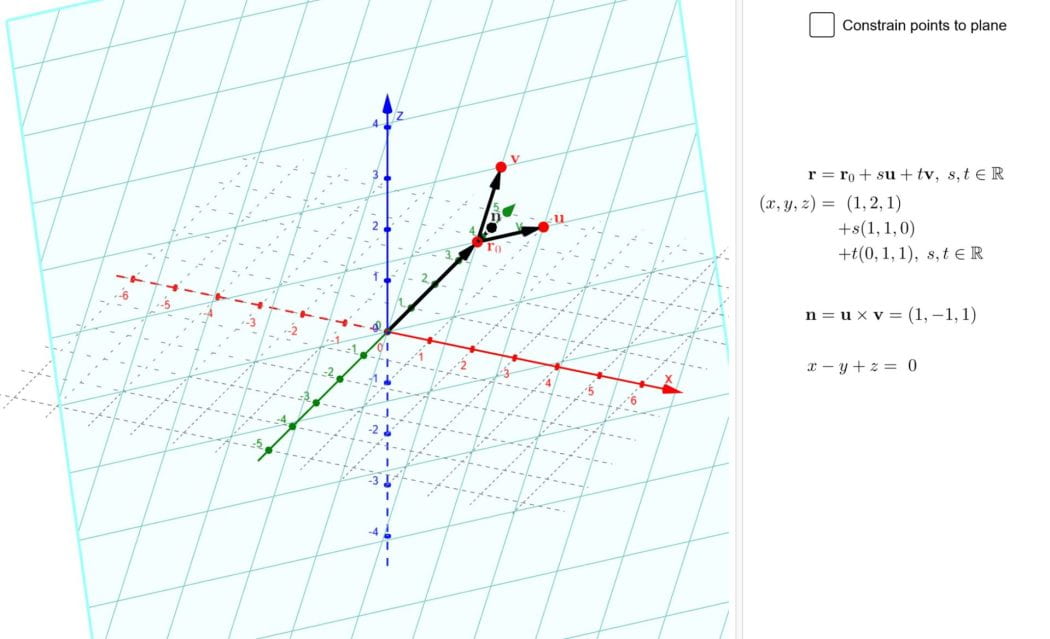
A vector equation for a plane has the form r = r0 + su + tv, s,t ∈ ℝ where r0 is the position vector of a point on the plane, and u and v are vectors parallel to the plane.
You can click and drag r0, u and v to adjust the plane.
Try modifying each of the vectors in turn, to see what the resulting planes and their normal vectors have in common.
By default you can only move the points horizontally (parallel to the xy-plane); if you wish to switch between moving the points horizontally or vertically, click on the point a second time.
If you select the “Constrain points to plane” checkbox, the plane will be locked in place, and r0, u and v will only be able to be moved within the plane. This allows you to see that the same plane can have many possible vector equations.
Other resources: